TLDR¶
• Core Points: Harvard researchers 3D-print soft robots with embedded air channels to enable programmable bending, twisting, gripping, and locomotion by air pressure, streamlining soft-robot fabrication.
• Main Content: A new 3D-printing approach replaces traditional molding and casting, allowing precise, air-driven actuation of soft structures with intricate motions.
• Key Insights: Direct 3D printing of elastic, catheter-like channels enables rapid prototyping and complex motions that previously required multi-step manufacturing.
• Considerations: Practical deployment requires reliable control systems, material durability, and scalable manufacturing for varied applications.
• Recommended Actions: Explore enhanced printing materials, integrated sensing, and robust pneumatic control to expand use cases in soft robotics.
Content Overview¶
Soft robotics has long promised adaptable, safer, and more versatile machines capable of interacting with humans and delicate objects. Traditional soft-robotics fabrication typically relies on slow, multi-step molding and casting processes. These methods often involve creating molds, casting elastomeric polymers, curing, demolding, and assembling components before any actuation testing occurs. Such workflows can be time-consuming, costly, and challenging to iterate on quickly, particularly when researchers want to explore new geometries or functionalities.
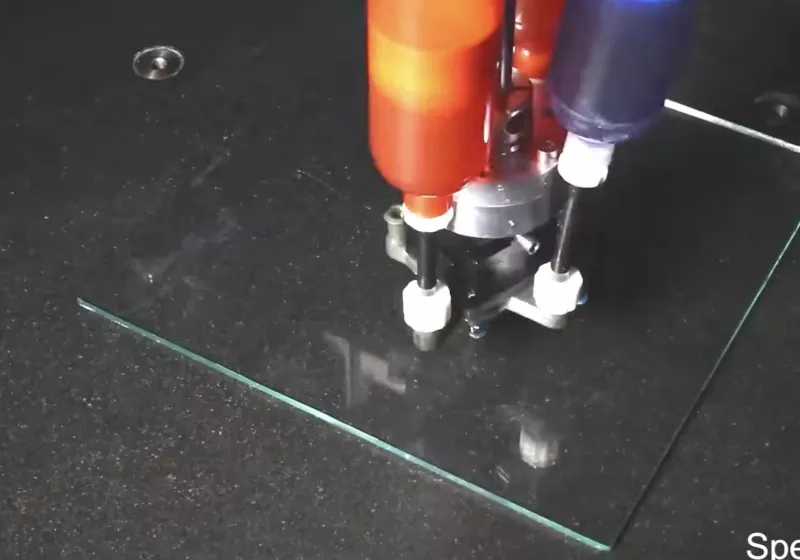
A recent development from researchers at Harvard offers a radical shift in how soft robots can be designed, produced, and programmed. By leveraging advanced 3D printing techniques, the team has demonstrated the capability to manufacture soft robotic structures with embedded channels that can be actuated simply by pumping air. This approach enables the robots to bend, twist, curl, and grasp objects—precisely following the programmed instructions embedded in their geometry. In effect, air pressure serves as the sole actuator, with the robotic performance dictated by the internal architecture created during printing. The method, described in the journal Advanced Materials, represents a significant step toward faster iteration, broader design exploration, and potentially more affordable production of soft robots for research and practical applications alike.
The core idea is straightforward but technically nuanced: design a geometric pattern of hollow channels within a flexible, elastic body, and then use externally supplied air pressure to drive controlled deformation. By varying the layout, size, and orientation of these channels, researchers can produce a wide range of motions—from simple bending to complex twisting maneuvers and gripping actions. The novelty lies not only in achieving these actions without post-processing but also in enabling rapid prototyping. 3D printing can directly lay down elastomeric materials with internal passages, eliminating the need for manual assembly steps that often introduce misalignments or variability.
This development sits at the intersection of materials science, mechanical engineering, and additive manufacturing. It has particular relevance for soft robots intended to assist in delicate manipulation, search-and-rescue tasks, medical devices, soft grippers for handling fruits and vegetables, and other scenarios where rigid robots either cannot safely interact with humans or fragile objects, or where elastically compliant bodies offer safer and more adaptable interfaces.
In providing context, researchers have long sought to mimic the versatility of natural soft tissues and muscles, which can bend, twist, and adapt to complex surroundings. Early soft robots achieved motion primarily through external actuation methods or by embedding actuators in a laminate structure, but these approaches often required a combination of manufacturing steps and external hardware. The Harvard work shifts the emphasis toward monolithic printing of soft bodies with integrated pneumatic channels, where motion emerges from the interplay between material properties and internal pressurization. This enables a streamlined workflow, with potential reductions in production time and the barrier to experimenting with new designs.
The report in Advanced Materials details how the team approached material selection, printer capabilities, nozzle geometries, and print parameters to realize functional, air-driven soft robots. The researchers evaluated how channel geometry affected bending curvature, twist rate, and gripping strength, and they demonstrated devices capable of performing tasks such as grasping and moving when air is supplied. The results underscore the feasibility of producing reliable soft robots from a single print job, provided that the printer can accurately render the fine internal channels and the material can withstand repeated inflation cycles without degrading or rupturing.
In addition to showcasing the fundamental capability, the study highlights practical considerations for real-world use. These include calibration of the pneumatic control system to achieve deterministic movements, ensuring the durability of the elastomeric material under cyclic loading, and managing the trade-offs between channel complexity and printability. The outcomes present a pathway for researchers and developers to rapidly design, test, and refine soft robotic components, potentially shortening development timelines from months to weeks or days in some cases.
This advancement aligns with broader trends in additive manufacturing: expanding the functional capabilities of 3D-printed parts beyond static shapes toward active, responsive systems. It also dovetails with the demand for safer human-robot interfaces, as soft robots are inherently more forgiving when interacting with people or delicate objects. The Harvard approach demonstrates that with careful design and controlled actuation, 3D-printed soft robots can achieve a level of versatility that previously required more complex and labor-intensive fabrication methods.
Looking ahead, key questions remain. How durable are these printed elastomeric channels under long-term use and repeated pressurization? Can fast, compact, and economical pneumatic control systems be integrated into more compact devices to enable portable soft robots? How scalable is the approach for larger structures or those requiring more precise or rapid motion? Researchers will likely explore new materials with enhanced elasticity and resilience, advanced internal channel layouts to expand motion capabilities, and improved sensing to add feedback for more sophisticated control. By tackling these questions, the field can move closer to commercially viable soft robots that can safely assist, augment, or complement human activities across medicine, manufacturing, search-and-rescue, and consumer products.
In-Depth Analysis¶
The crux of this innovative method lies in the converging strengths of soft elastomeric materials and the precision of modern 3D printing. Traditional soft robotics often battles a fundamental tension: achieving complex, multi-degree-of-freedom motion while maintaining a fabrication process that remains cost-effective and scalable. The Harvard team’s strategy addresses this by embedding air channels directly into the body of the soft robot during printing. When air is pumped into these channels, the surrounding elastomer expands, causing localized bending or twisting depending on the channel geometry and orientation.
One of the pivotal advantages of this approach is the elimination or significant reduction of post-processing steps. In conventional soft-robotics fabrication, researchers must fabricate molds, cast elastomeric materials, cure, demold, assemble with embedded actuators or sensors, and then test. Each step introduces potential defects, misalignments, and variability that complicate iteration. By designing and printing the structure as a single part with integrated channels, the process becomes inherently more repeatable and scalable for multiple design variants.
The technical workflow begins with careful material selection. The team uses a silicone-like elastomer that can be extruded or cured into flexible, durable soft bodies. This material must tolerate repeated expansions without fatigue cracking, maintain elasticity over many inflation cycles, and bond well with the printing process to form leak-free channels. The 3D printer itself must be capable of fabricating tiny, embedded channels with smooth surfaces to prevent air leaks and to maintain predictable actuation. Recent advances in multi-material 3D printing and high-resolution extrusion have made such capabilities more accessible to research labs and, increasingly, to industry.
Channel geometry is central to how such soft robots achieve movement. The channels function as internal pneumatic actuators: inflating one region relative to another induces bending toward the stiffer or less inflated side, twisting if channels are arranged along a helical or asymmetric pattern, or curling when inflation is distributed in a curved path. By varying the pattern—such as alternating open and closed channels, or designing gradients of channel size—the researchers can encode precise motion profiles into the robot’s geometry. This means that a single printed piece can execute a suite of movements simply by controlling the input air pressure.
Another important consideration is the control system. Pneumatic actuation requires a reliable feed of compressed air, a way to regulate pressure with fine granularity, and feedback to ensure movements follow the programmed trajectory. In many soft-robot projects, this control layer is discrete and bulky, using external pumps and valves that dominate the system’s footprint. The Harvard study demonstrates the feasibility of compact pneumatic control, and ongoing work in this direction will be essential for integrating soft robots into portable devices or end-user products. Advances in micro-pump technology, soft-pressure sensors, and compact control electronics will be important complements to the printing approach.
Durability remains a practical concern. Elastomeric materials, while flexible, can experience fatigue under cyclic loading. The walls of internal channels must maintain their integrity over thousands or millions of inflation cycles, and the interfaces between printed layers must remain airtight. Researchers will need to optimize both material formulations and print parameters to mitigate leakage, delamination, or thinning of walls. The balance between channel size and mechanical strength is delicate: smaller channels may provide higher resolution actuation but could be more prone to collapse or wear, while larger channels may deliver stronger actuation at the expense of precision.
From a design perspective, the ability to rapidly fabricate and test multiple geometries is a major boon. In soft robotics, iteration is often the bottleneck to discovery: researchers conceive a design in a CAD environment, produce a mold, cast prototypes, test performance, and revise. A printed approach allows this cycle to move faster, as changes can be implemented in digital models and printed anew the next day. This accelerates the exploration of new actuation modes, new gripper configurations, and entirely novel devices. The result is a more agile research workflow and a clearer path toward application-oriented prototypes.
In terms of performance, the study demonstrates that these 3D-printed soft robots can bend, twist, curl, and grasp in response to air pressure. The degree of motion is programmable, meaning the same basic unit can be instructed to perform various tasks by simply adjusting the air input. This is particularly compelling for soft grippers designed to handle delicate objects. The compliance of the soft body reduces the risk of damage to the object being manipulated compared with rigid robots, and the integrated channels provide a direct, lightweight actuation mechanism that avoids the complexity of additional power transmission components.
Beyond the laboratory, the implications of this technology extend to multiple domains. In medical contexts, soft robots could navigate through the human body or interact with soft tissues with a reduced risk of injury. In manufacturing, soft grippers could handle fruits, vegetables, or assembled components without crushing or deforming them. In disaster response or search-and-rescue missions, soft robots could be deployed in rubble or cramped spaces where rigid machines struggle to maneuver. In education and outreach, simplified 3D-printed soft robots could serve as accessible platforms for teaching principles of robotics, material science, and engineering.

*圖片來源:Unsplash*
However, to transition from proof-of-concept demonstrations to widespread use, several milestones must be met. One is material development: identifying elastomeric compounds that combine high elasticity, resilience, chemical stability, and compatibility with the chosen printing technology. Another is standardization: establishing repeatable printing parameters so that devices produced in different labs or at different times behave consistently. A third is sensing and feedback: adding embedded or integrated sensors to monitor pressure, deformation, and contact with objects, enabling closed-loop control and more sophisticated behaviors. Finally, there is the matter of scalability: can the printing approach be applied to larger, more complex systems, or integrated into modular assemblies for more complex robots?
The Harvard effort also raises interesting questions about the cost and accessibility of soft-robot manufacturing. If high-resolution multi-material 3D printers become more widely available, researchers and developers across academia and industry could experiment with soft robots at a lower cost. This democratization could spur a wave of innovation in soft robotics design, leading to unintended but beneficial applications and new business models around customized, small-batch production of soft devices tailored to specific tasks.
In exploring the broader trajectory of the field, this work can be viewed as part of a longer arc toward more intelligent, responsive machines that interact safely and effectively with humans and the environment. The ability to print soft robots with embedded actuation channels expands the toolbox available to engineers seeking to design safe, compliant, and adaptable automated systems. As researchers refine materials, sensors, and control strategies, the barrier to deploying soft robots in real-world settings will continue to decrease.
Looking to the future, researchers may investigate hybrid systems that combine printed soft bodies with rigid components where necessary to achieve specific performance goals. They may also explore multimaterial printing to integrate multiple elastomeric formulations within a single device, each contributing distinct mechanical properties. The integration of soft robotics with machine learning and advanced control algorithms could enable autonomous, adaptive behavior in response to dynamic environments. The potential for soft robots to perform tasks currently beyond the reach of rigid robots is considerable, and this 3D-printing approach represents a meaningful step toward that promise.
In summary, the Harvard team’s capability to 3D-print soft robots with embedded air channels that can bend, twist, curl, and grasp on command marks a notable milestone in soft robotics. By eliminating many traditional manufacturing steps and enabling rapid design iteration, this method broadens access to functional, programmable soft devices. The work emphasizes the importance of channel geometry, material choice, and pneumatic control in shaping motion, and it opens avenues for future research into more durable materials, integrated sensing, and scalable production. As the field progresses, such programmable soft robots hold the potential to transform a range of applications—from delicate manipulation tasks to exploratory robotics in challenging environments—by combining the safety and adaptability of soft materials with the precision and repeatability of digital fabrication.
Perspectives and Impact¶
The ability to 3D-print soft robots with internally defined pneumatic channels could have substantial implications for education, research, and industry. For education, the simplified fabrication process lowers barriers to entry for students and researchers learning about soft robotics. In a classroom or lab setting, students could design, print, test, and iterate a soft robot in the span of a few days, reinforcing concepts related to materials science, fluid dynamics, and control systems. For research, the approach enables rapid exploration of new actuation mechanisms and new morphologies, accelerating discovery and the publication of results. In industry, the approach offers potential for cost-effective prototyping of soft devices and possibly the production of small-batch devices for specialized applications, such as medical devices, soft grippers, or soft-tactile sensors.
The broader impact includes advancing the capabilities of soft robotics in safe human-robot collaboration. By using compliant, programmable bodies, soft robots can interact more safely with people and with objects that require careful handling. This could enable more intuitive human-robot collaboration in manufacturing settings, healthcare environments, or service sectors where delicate manipulation is essential.
From a strategic perspective, the work demonstrates how additive manufacturing can push soft robotics from purely experimental domains toward practical, deployable technologies. It aligns with ongoing efforts across the field to integrate sensing, actuation, materials, and control within single, streamlined manufacturing workflows. As the technology matures, it will be important to build robust supply chains for printable elastomeric materials, to establish standards for dimensions and tolerances in printed soft devices, and to cultivate cross-disciplinary collaborations that bring together materials science, mechanical engineering, computer science, and human factors.
Future research directions may include the development of more sophisticated internal channel networks capable of powering advanced maneuvers, such as rapid conformation to irregular surfaces or coordinated multi-joint movements that emulate more complex limbs. Researchers might also work on integrating flexible sensors directly into the printed material, enabling real-time monitoring of strain, pressure, and contact. This would facilitate closed-loop control and more autonomous operation without requiring bulky external sensing hardware.
Ethical and regulatory considerations will also accompany broader adoption. As soft robots become more capable in public or professional environments, it will be important to assess any safety risks, ensure user-friendly controls, and address concerns about job displacement or the responsible use of robotic systems. Responsible innovation, including transparency about capabilities and limitations, will help ensure that advancements in 3D-printed soft robotics benefit society while minimizing potential downsides.
Overall, the Harvard study contributes a compelling blueprint for how 3D printing can expand the functional repertoire of soft robots. By embedding air-actuated channels within a single printable body, researchers can realize a range of motions with relatively simple external infrastructure. The approach promises faster development cycles, greater design flexibility, and broader access to the benefits of soft robotics. If continued progress addresses durability, sensing, and scalability, 3D-printed soft robots could become a common sight in research labs, educational settings, and niche industrial applications where safe, compliant manipulation is paramount.
Key Takeaways¶
Main Points:
– Embedded air channels within 3D-printed soft bodies enable programmable bending, twisting, curling, and grasping.
– The method removes many traditional molding and casting steps, accelerating design iterations.
– Material choice and channel geometry are critical to achieving predictable, repeatable motion.
Areas of Concern:
– Long-term durability under cyclic inflation remains a question.
– Integration of sensing and closed-loop control requires further development.
– Scaling to larger or more complex systems may present challenges.
Summary and Recommendations¶
Harvard’s 3D-printed soft robot approach marks a meaningful advancement in soft robotics by enabling intricately actuated motions through internal pneumatic channels embedded during printing. This method streamlines fabrication, supports rapid design iteration, and delivers programmable movements without extensive post-processing. The potential applications are broad, spanning medical devices, delicate manipulation tasks, soft grippers, and responsive robotics in challenging environments.
However, several avenues warrant attention to translate this capability into widely deployable technology. First, material science efforts should continue to identify elastomeric formulations that withstand prolonged cycling and maintain elasticity, with improved resistance to wear and environmental factors. Second, integration of sensing mechanisms, whether embedded within the printed layers or via flexible external sensors, will be essential to achieve robust closed-loop control and autonomous operation. Third, researchers and developers should explore scalable, compact pneumatic systems that can power multiple channels and joints in portable formats, along with standardized design practices to ensure reproducibility across labs and manufacturing settings.
In practice, the path forward involves a combination of material innovation, control engineering, and manufacturing optimization. Collaboration across disciplines—materials science, mechanical design, electronics, and human-robot interaction—will be key to realizing the full potential of 3D-printed soft robots with embedded air channels. If these challenges are addressed, the technology could unlock rapid production of safe, adaptable, and responsive robotic devices for a wide range of applications, bringing the promise of soft robotics closer to everyday use.
In conclusion, the Harvard study demonstrates that it is possible to print soft robotic structures with built-in pneumatic actuation channels that achieve controlled bending, twisting, curling, and grasping on demand. By reducing reliance on multi-step fabrication processes and enabling quick design iterations, this work helps pave the way for more flexible, accessible, and scalable soft robotics. The continued evolution of materials, sensing, and control will determine how quickly these printed soft robots become practical tools in research, industry, and daily life.
References¶
- Original: https://www.techspot.com/news/111242-harvard-engineers-3d-print-soft-robots-bend-twist.html
- Additional references:
- Advanced Materials journal article detailing the 3D-printing approach for soft robots with embedded pneumatic channels.
- Reviews on soft robotics fabrication methods and the role of additive manufacturing in programmable elastomeric devices.

*圖片來源:Unsplash*